Welcome back to learn about INAV interface,there are 3 parts of main page
(歡迎回來INAV介面介紹,在執行INAV軟體後在首頁我們可以分成3個部分)
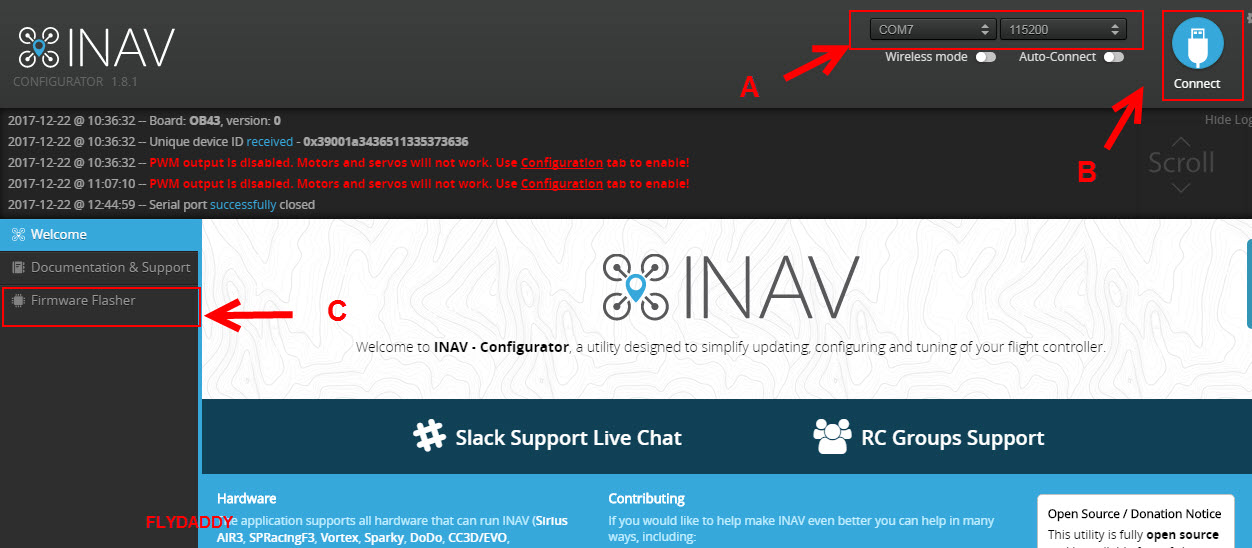
------------------- Welcome Page -------------------
TOP:
A: [Connect port list] [連接埠]
After connect your fly board you can see a new com port (ex:COM7) , it is meaning you did install usb drive very well, if did't see , please check your usb driver install step again.
also in INAV if you do a FW upgrade processing , here will show "DFU" mode.
如果你有正確的安裝驅動程式的話會看到新的連接埠出線,這表示你安裝驅動程式的過程很正常,如果沒出現請再檢察是否安裝驅動程式沒有做好,此外如果你進行更新分位的時候這裡也線自動進入DFU模式
B: [Connect button] [連接按鈕]
Choose a port and click this button into INAV setting page
選好連接埠後點選Connect按扭進入設定頁面
------------------ Main Page -------------------

Working: blue light , failed/Error: red light
燈號顯示: 正常:藍燈 錯誤:紅燈
A: [Motor arming] : status of motor starting 馬達是否啟動狀態
B: [Failsafe mode]: status of failsafe (setting Failsafe page) 是否進入失控保護狀態
C: [Serial link status]: status of your receiver 接收器的狀態
D: [GYRO]: status of gyroscope 陀螺儀狀態
E: [Accel]:status of accelerometer 加速度計狀態
F: [Mag]: status of magnetometer 磁力計 / 羅盤 /指南針狀態
G: [Baro]: status of barometer 氣壓計狀態
H: [GPS]: status of GPS 導航狀態
I: [Flow]: status of optical flow 光流計狀態 (非必需)
J: [Sonar]: status of sonar / range finder 聲納或測距儀狀態 (非必需)
K:[Speed]: status of airspeed 空速計狀態 (非必需)
L:[databflash storage]: status of external micro SD (資料儲存裝置 通常是內建或是SD卡)
M:[Profile]: choose one of profiles for using (可以分別設定三個系統設定檔進行切換)
N:[Connect/Disconnect]: Connect or Disconnect INAV (連線/中斷連線)
O:[Battery]:Battery voltage (電壓顯示此功能必須要焊接飛控)
P:[LOG]: log / message (顯示操作過程訊息)


A. Pre-arming checks area (解鎖檢查表)
Before you unlock your motor (arming) , this area all items must be green light first, it's meaning system ready to fly , if you see any error from here, you should troubleshooting and fix it first.
要能夠解鎖的首要條件就是這個區域必須都是綠燈,如果有任一紅燈則無法正常解鎖
這裡所列的項目通常會跟你的配置有關
B.Info area(基本資訊顯示區)
Here
C.GPS area( 導航資訊顯示區)
Here will show GPS information ,(if you have GPS) if you want to get more detail ,please click
Page of GPS.
這裡將顯示部分跟GPS有關的訊息,如果需要取得更多資訊請點到GPS設定頁面
D.testing your drone (飛行器測試區)
Trying move your controller and check it when you connect to USB
連接USB後你可以對你的飛控做一些動做,你非發現它會跟著你的飛控方向運做
Before you unlock your motor (arming) , this area all items must be green light first, it's meaning system ready to fly , if you see any error from here, you should troubleshooting and fix it first.
要能夠解鎖的首要條件就是這個區域必須都是綠燈,如果有任一紅燈則無法正常解鎖
這裡所列的項目通常會跟你的配置有關
B.Info area(基本資訊顯示區)
Here
C.GPS area( 導航資訊顯示區)
Here will show GPS information ,(if you have GPS) if you want to get more detail ,please click
Page of GPS.
這裡將顯示部分跟GPS有關的訊息,如果需要取得更多資訊請點到GPS設定頁面
D.testing your drone (飛行器測試區)
Trying move your controller and check it when you connect to USB
連接USB後你可以對你的飛控做一些動做,你非發現它會跟著你的飛控方向運做

































